Soft robots are a class of robotic systems made of compliant materials and capable of safely adapting to complex environments. They have seen rapid growth recently and come in a variety of designs spanning multiple length scales, from meters to submicrometers.
In particular, small soft robots at millimeter scale are of practical interest as they can be designed as a combination of miniature actuators simply driven by pneumatic pressure. They are also well suited for navigation in confined areas and manipulation of small objects.
However, scaling down soft pneumatic robots to millimeters results in finer features that are reduced by more than one order of magnitude. The design complexity of such robots demands great delicacy when they are fabricated with traditional processes such as molding and soft lithography. Although emerging 3D printing technologies like digital light processing (DLP) offer high theoretical resolutions, dealing with microscale voids and channels without causing clogging has still been challenging. Indeed, successful examples of 3D printing miniature soft pneumatic robots are rare.
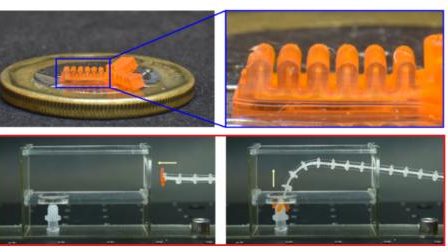
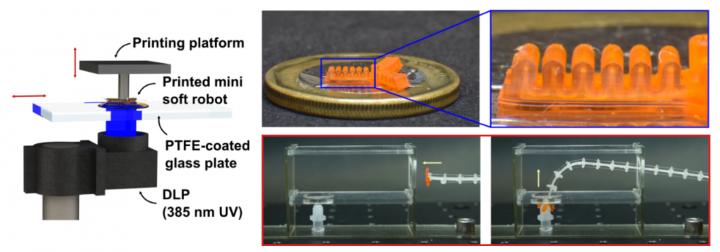
Recently, researchers from Singapore and China, namely from the Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) and Zhejiang University (ZJU), proposed a generic process flow for guiding DLP 3D printing of miniature pneumatic actuators for soft robots with overall size of 2-15 mm and feature size of 150-350 μm (please refer to image). Their research was published in Advanced Materials Technologies.
“We leveraged the high efficiency and resolution of DLP 3D printing to fabricate miniature soft robotic actuators,” said Associate Professor Qi (Kevin) Ge from SUSTech, lead researcher of the research project. “To ensure reliable printing fidelity and mechanical performance in the printed products, we introduced a new paradigm for systematic and efficient tailoring of the material formulation and key processing parameters.”
In DLP 3D printing, photo-absorbers are commonly added into polymer solutions to enhance the printing resolutions in both lateral and vertical directions. Meanwhile, overly increasing the dose leads to rapid degradation in the material’s elasticity which is crucial for soft robots to sustain large deformations.
“To achieve a reasonable trade-off, we first selected a photo-absorber with good absorbance at the wavelength of the projected UV light and determined the appropriate material formulation based on mechanical performance tests. Next, we characterized the curing depth and XY fidelity to identify the suitable combination of exposure time and sliced layer thickness,” explained co-first author Yuan-Fang Zhang from SUTD.
“By following this process flow, we are able to produce an assortment of miniature soft pneumatic robotic actuators with various structures and morphing modes, all smaller than a one Singapore Dollar coin, on a self-built multimaterial 3D printing system. The same methodology should be compatible with commercial stereolithography (SLA) or DLP 3D printers as no hardware modification is required,” said corresponding author Professor Qi Ge from SUSTech.
To exemplify the potential applications, the researchers also devised a soft debris remover comprising a continuum manipulator and a 3D printed miniature soft pneumatic gripper. It can navigate through a confined space and collect small objects in hard-to-reach positions.
The proposed approach paves the way for 3D printing miniature soft robots with complex geometries and sophisticated multimaterial designs. This integration of printed miniature soft pneumatic actuators into a robotic system offers opportunities for potential applications such as jet-engine maintenance and minimally invasive surgery.